@hachikoi 您好,请问您的问题现在解决了吗?我现在也在做和您相似的双浮体模拟,但是在模拟时出现了第一部就会发散的问题,重叠网格挖的洞数量很大。
S
Sichan
@Sichan
帖子
-
overset 小间隙-多浮体算例 计算结果明显有误 -
寻求帮忙看看采用重叠网格对平台做自由衰减后自由衰减曲线不符合衰减曲线的原因@chenboyao 在 寻求帮忙看看采用重叠网格对平台做自由衰减后自由衰减曲线不符合衰减曲线的原因 中说:
我采用重叠网格对浮式平台做自由衰减,结果自由衰减的数据曲线到最后不符合自由衰减的趋势,而是还向下偏移了,不知道是什么情况造成的,希望有人帮我看看一下,为什么会出现这种情况。
您好,请问您的自由衰减实验做成功了嘛?我现在也在做浮式平台的自由衰减实验,也遇到过类似的问题,想很您交流一下

-
关于dynamicMeshDict里rigidBodyMotion和sixDoFRigidBodyMotion的问题请教各位大佬好,目前我在用OpenFOAM做多浮体在波浪作用下的数值模拟。有些问题想要请教:
1、在constant文件夹中有dynamicMeshDict文件,在之前的学习过程中我主要接触到的是sixDoFRigidBodyMotion和rigidBodyMotion这两类求解器。据我目前了解,前者只可以用来模拟单物体,后者可以模拟多物体。不知我理解的是否正确?
2、在学习过程中,我对一些算例进行sixDoFRigidBodyMotion和rigidBodyMotion这两类求解器的计算结果比较,目前是找到了两个算例,分别是OpenFOAM中tutorials/multiphase/interFoam/RAS/floatingObject以及foamMooring中关于overset的算例,连接如下:https://gitlab.com/hfchen20/foamMooring/-/tree/master/tutorial/rgb_overset?ref_type=heads
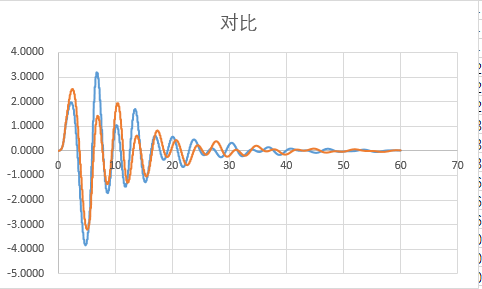
我对这两个算例都分别使用采用sixDoFRigidBodyMotion和rigidBodyMotion的dynamicMeshDict进行了试算比较。然后发现计算得到的结果,如物体的位移、旋转的角度时程曲线基本一致。但是当我在此基础上新设算例,就是在dynamicMeshDict中加入一个linearAxialAngularSpring后,再计算出来的结果就会出现较大不同,这可能是哪些原因导致的呢?
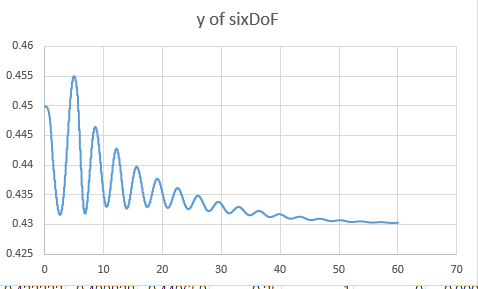
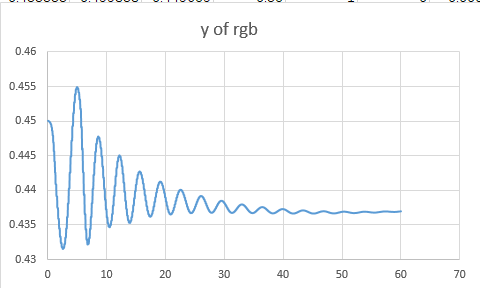
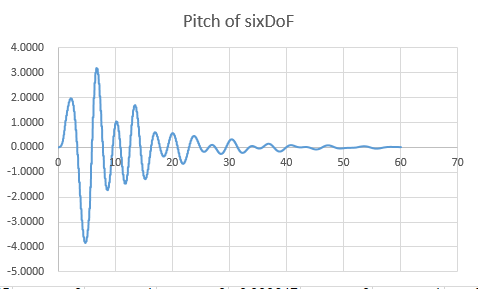
以下是我整理后画出来的时程图:floatingObject算例
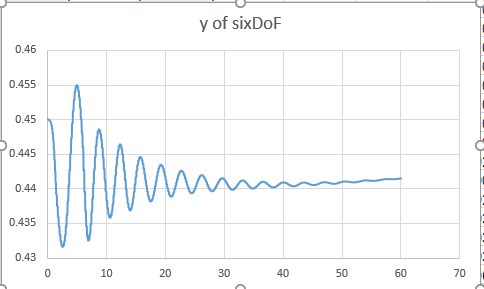
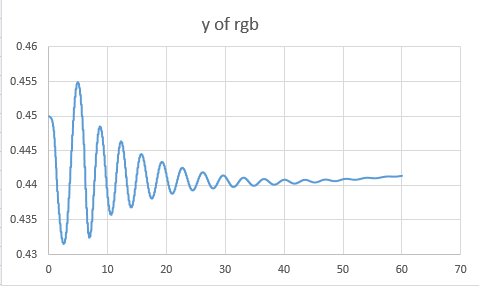
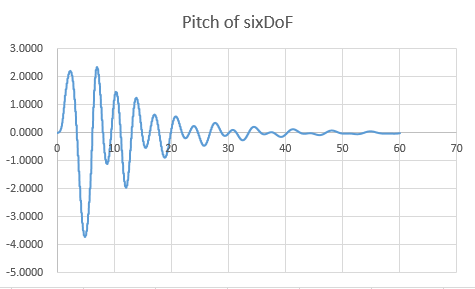
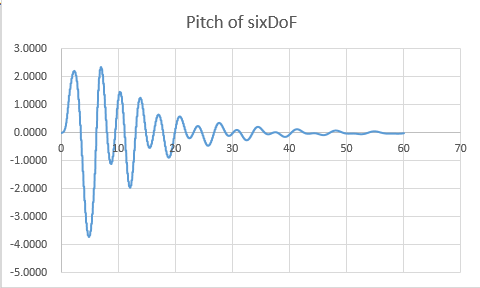
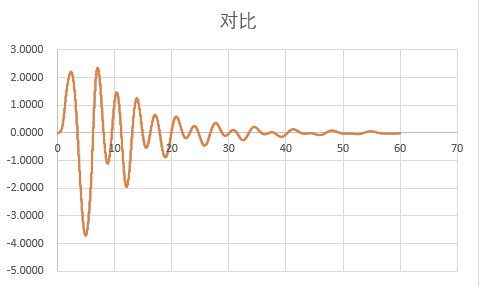
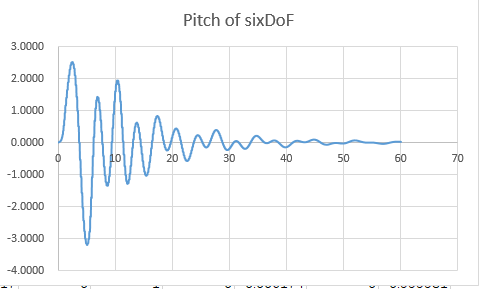
上面是没有加linearAxialAngularSpring,下面是加了之后的:
这是dynamicMeshDict代码对比:
/*--------------------------------*- C++ -*----------------------------------*\ | ========= | | | \\ / F ield | OpenFOAM: The Open Source CFD Toolbox | | \\ / O peration | Version: v2012 | | \\ / A nd | Website: www.openfoam.com | | \\/ M anipulation | | \*---------------------------------------------------------------------------*/ FoamFile { version 2.0; format ascii; class dictionary; object dynamicMeshDict; } // * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * // dynamicFvMesh dynamicMotionSolverFvMesh; motionSolverLibs (rigidBodyMeshMotion); motionSolver rigidBodyMotion; rigidBodyMotionCoeffs { report on; solver { type Newmark; } accelerationRelaxation 0.7; bodies { floatingObject { type cuboid; parent root; // Cuboid dimensions Lx 0.3; Ly 0.2; Lz 0.5; // Density of the cuboid rho 500; // Cuboid mass mass #eval{ $rho*$Lx*$Ly*$Lz }; L ($Lx $Ly $Lz); centreOfMass (0 0 0.25); transform (1 0 0 0 1 0 0 0 1) (0.5 0.45 0.1); joint { type composite; joints ( { type Py; } { type Ry; } ); } patches (floatingObject); innerDistance 0.05; outerDistance 0.35; } } restraints { /*axialSpring { type linearAxialAngularSpring; body floatingObject; axis (0 1 0); stiffness 10; damping 0; referenceOrientation (1 0 0 0 1 0 0 0 1); }*/ } } // ************************************************************************* ///*--------------------------------*- C++ -*----------------------------------*\ | ========= | | | \\ / F ield | OpenFOAM: The Open Source CFD Toolbox | | \\ / O peration | Version: v2012 | | \\ / A nd | Website: www.openfoam.com | | \\/ M anipulation | | \*---------------------------------------------------------------------------*/ FoamFile { version 2.0; format ascii; class dictionary; object dynamicMeshDict; } // * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * // dynamicFvMesh dynamicMotionSolverFvMesh; motionSolverLibs (sixDoFRigidBodyMotion); motionSolver sixDoFRigidBodyMotion; sixDoFRigidBodyMotionCoeffs { patches (floatingObject); innerDistance 0.05; outerDistance 0.35; centreOfMass (0.5 0.45 0.35); // Cuboid dimensions Lx 0.3; Ly 0.2; Lz 0.5; // Density of the solid rhoSolid 500; // Cuboid mass mass #eval{ $rhoSolid*$Lx*$Ly*$Lz }; // Cuboid moment of inertia about the centre of mass momentOfInertia #codeStream { codeInclude #{ #include "diagTensor.H" #}; code #{ scalar sqrLx = sqr($Lx); scalar sqrLy = sqr($Ly); scalar sqrLz = sqr($Lz); os << $mass *diagTensor(sqrLy + sqrLz, sqrLx + sqrLz, sqrLx + sqrLy)/12.0; #}; }; report on; accelerationRelaxation 0.7; //accelerationDamping 0; solver { type Newmark; } constraints { // fixedPoint // { // sixDoFRigidBodyMotionConstraint point; // centreOfRotation (0.5 0.45 0.1); // } fixedLine { sixDoFRigidBodyMotionConstraint line; centreOfRotation (0.5 0.45 0.1); direction (0 1 0); } fixedAxis { sixDoFRigidBodyMotionConstraint axis; axis (0 1 0); } } /*restraints { axialSpring { sixDoFRigidBodyMotionRestraint linearAxialAngularSpring; axis (0 1 0); stiffness 10; damping 0; referenceOrientation (1 0 0 0 1 0 0 0 1); } }*/ } // ************************************************************************* //3.为了搞清楚linearAxialAngularSpring,我还试着对tutorials/incompressible/pimpleFoam/RAS/wingMotion进行改写。因为这个算例中的dynamicMeshDict文件里使用了linearAxialAngularSpring。但是在原版的算例中,其使用的是sixDoFRigidBodyMotion,我想要将他改成rigidBodyMotion,但是我改后的算例只能算0.20s左右就会发散。在此我想请教一下有没有人做过类似的工作,能不能请教一下经验。
下面是我改的dynamicMeshDict文件:/*--------------------------------*- C++ -*----------------------------------*\ | ========= | | | \\ / F ield | OpenFOAM: The Open Source CFD Toolbox | | \\ / O peration | Version: v2012 | | \\ / A nd | Website: www.openfoam.com | | \\/ M anipulation | | \*---------------------------------------------------------------------------*/ FoamFile { version 2.0; format ascii; class dictionary; object dynamicMeshDict; } // * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * // dynamicFvMesh dynamicMotionSolverFvMesh; motionSolverLibs ("librigidBodyMeshMotion.so"); motionSolver rigidBodyMotion; //accelerationRelaxation 0.4; updateControl timeStep; updateInterval 1; rho rhoInf; rhoInf 1; rigidBodyMotionCoeffs { report on; solver { type symplectic; } rho rhoInf; rhoInf 1; bodies { wing { type rigidBody; parent root; mass 22.9; centreOfMass (0.2474612746 -0.02371895744 0); inertia (1.958864357 0 0 3.920839234 0 2.057121362); // Transformation tensor and centre of rotation transform (0.9953705935 0.09611129781 0 -0.09611129781 0.9953705935 0 0 0 1) (0.25 0.007 0.125); angularMomentum (0 0 -2); joint { type composite; joints ( { type Py; } { type Rz; } ); } patches (wing); innerDistance 0.3; outerDistance 1; } } restraints { verticalSpring { type linearSpring; body wing; anchor (0.25 0.007 0.125); refAttachmentPt (0 0 0); stiffness 4000; damping 2; restLength 0; } axialSpring { type linearAxialAngularSpring; body wing; axis (0 0 1); stiffness 700; damping 0.5; referenceOrientation (0.9953705935 0.09611129781 0 -0.09611129781 0.9953705935 0 0 0 1); } } } // ************************************************************************* // -
以DTCHullWave算例为例 ,使用dynamicmeshDict计算船舶波浪增阻,这里参数的意义是我所标注的这个意思吗?您好,我想在您这个回答的基础上再问一个问题。由于在rigidBodyMotion求解器中,centraOfMass是相对于centraOfRotation,那么sixDoFRigidBodyMotion求解器中的momentOfInertia改成rigidBodyMotion求解器中的interia应该做何种变换呢?