如何将一些固体particles的体积整合成一个球形的有效parcel
-
@星星星星晴 您说的对,这个应该是cloud层面的.我的想法主要是用来改善目前MPPIC中的interparticle stress.目前的这个用stress表达的并不准确,并且误差很大.如果换成纯粹的DPMFoam,那么就增大了很多计算量.所以我想,在MPPIC上,将每个网格里的粒子当做一个有效球体,与想要进入网格的粒子进行碰撞.那么也就是说,粒子本身还是parcel层面的,这样才能追踪;但同时,在进入别的网格时受到的碰撞效果由整个网格里的有效球体来实施.碰撞力根据DPM来.这样粒子就能避免目前MPPIC的inter-particle stress带来的误差.这样的话,算不算抹去了原本粒子呢?或者说原本位置上的粒子是有的,但是没有相互作用力,是不是更准确些?
-
回来了,都回来了~
-
回来了,都回来了~
-
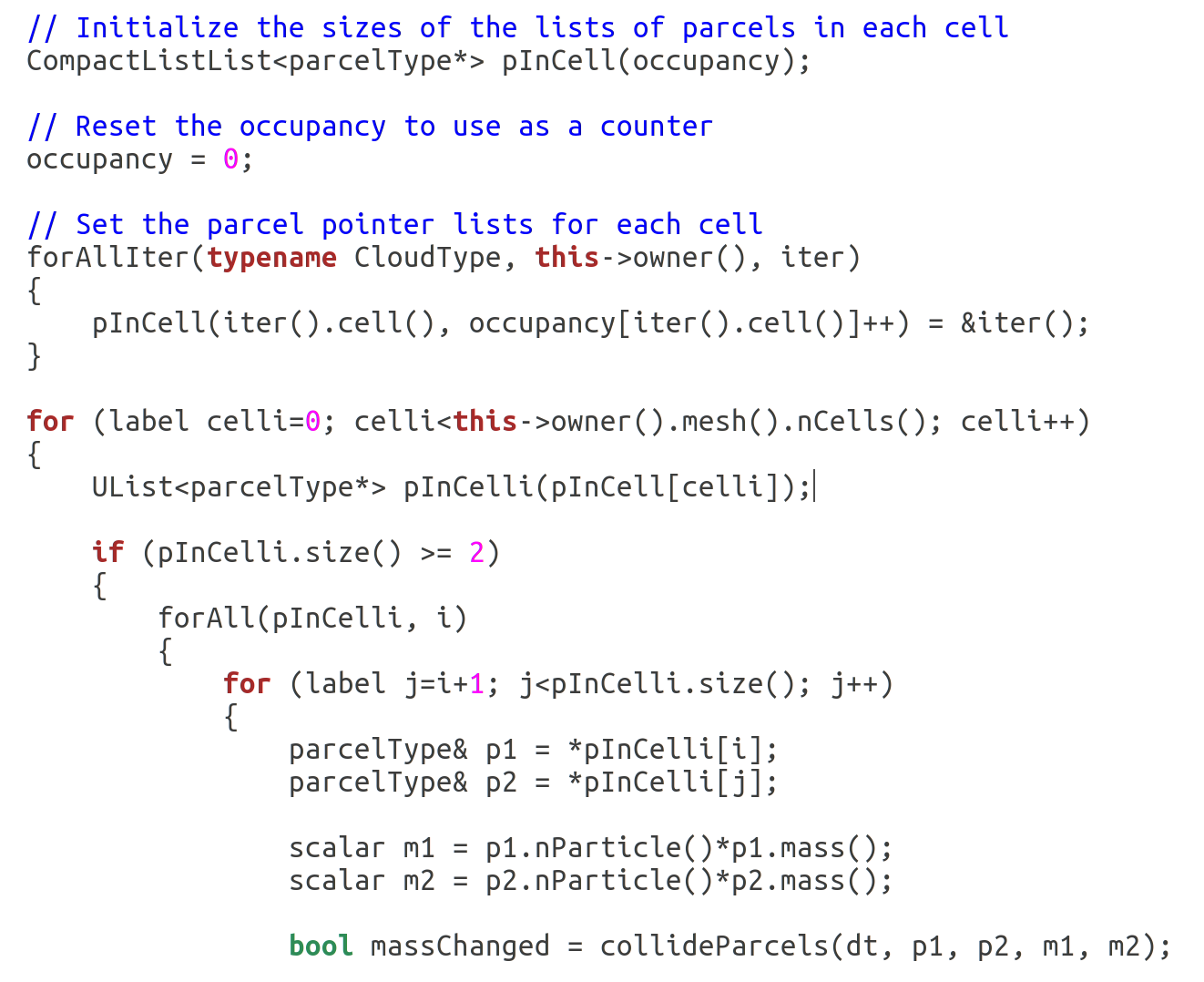
@zhe 我可能问的不太仔细,你看一下sprayCloud里面的 stochastic collision model,就是Orouke model, 和你想用的比较像,但是他是在cell中寻找另两个真parcel,你把真p1和真p2 其中的一个换成假parcel即可。
我们这边用的是这个模型
Influence of inter‐particle collisions and agglomeration on cyclone performance and collection efficiency
Oscar Lino Sgrott Júnior Martin Sommerfeld
还有
Validation of a stochastic Lagrangian modelling approach for inter-particle collisions in homogeneous isotropic turbulence
Martin sommerfeld
https://www.sciencedirect.com/science/article/abs/pii/S0301932201000350我们也是生成一个假parcel,pp碰撞
-
-
-
@星星星星晴 您好,我这两天都在研究您提到的stochastic collision model, 帮助很大,首先谢谢您.我有一个小问题,如果在MPPIC的方法中,既然应用了inter-particle stress (packing model)再加上damping model, 那么是不是stochastic collision model就不应该并存了?或者说是不是二选一比较妥当.虽然在现在OpenFOAM自带的MPPIC的tutorials,在kinematicCloudProperties文件里,两个都显示了,但是stochastic collision model都是默认了none. 那么如果我想要在MPPIC中加入另外的碰撞的模型,还是需要关掉packing,damping,isotropic这3种 stresses? 希望您有时间了可以回复.
-
回来了,都回来了~
-
回来了,都回来了~