可以试试改为速度入口
Y
yanoo
@yanoo
帖子
-
求教,fliuen用周期性边界条件给固定的质量流率,计算发散 -
当我把一个封闭几何体的各个面分成多个stl文件,snappyhexmesh文件中该怎么定义这些stl呢,它自动识别并封闭吗?各位大佬有这种拆开stl边界的snappyhexmesh文件能发参考一下吗?
-
当我把一个封闭几何体的各个面分成多个stl文件,snappyhexmesh文件中该怎么定义这些stl呢,它自动识别并封闭吗?geometry { inlet { type triSurfaceMesh; file "inelt.stl"; } wall { type triSurfaceMesh; file "wall.stl"; } outlet1 { type triSurfaceMesh; file "outlet1.stl"; } outlet2 { type triSurfaceMesh; file "outlet2.stl"; } };我是这么写的,但是运行有报错:Cannot find triSurfaceMesh at "/home/openfoam/6207/1/constant/triSurface/inelt.stl"
-
openfoam编译安装报错,困扰好久求大佬指点@bestucan 感谢回复,试了一下用单核编译仍然失败。我试着编译了openfoam8和2406多个版本都存在相同问题。
-
openfoam编译安装报错,困扰好久求大佬指点@Amadeus 系统是redhat7.9。现在就是solvers编译报错。之前好像是redhat7. 几系统我是能正常编译安装的,后来出故障重装了这个系统,我现在就编译不上了。
-
openfoam编译安装报错,困扰好久求大佬指点@李东岳 gcc 10.1.0
-
openfoam编译安装报错,困扰好久求大佬指点

-
关于openfoam安装过程问题-第三方依赖包没起作用 -
关于openfoam安装过程问题-第三方依赖包没起作用我是通过编译安装,首先下载了thirdparty包和openfoam2406的包。我先编译第三方包再编译openfoam。为啥还是会出现报错,显示GCC版本不够,我手动升级了,然后有没有mpi,我又安装了openmpi。 现在又提示我zlib.h文件找不到,我安装了zlib发现还是不行。。。 我想问这个第三方包里不就应该包含了这些需要的东西吗 ,为什么我编译了第三方包还是会出现安装openfoam缺东西。我不太理解这个第三方包了。
-
关于CFD计算服务器linux系统配置,AMD CPU是否会存在不兼容问题目前在准备配置linux计算系统,CPU上intel的最高支持64核,AMD可支持更高。想请问下AMD对openfoam多核计算兼容性怎么样。另外内存1TB是否够用,考虑最大网格1000万情况下,希望有大佬可以给点建议。还有1000万网格时需要开到64核以上计算吗?
-
在MRF/滑移网格模型中怎么设置旋转壁面上一个相对速度?实现类似SRF得到两个旋转速度的合成。有没有大佬可以指点一下
-
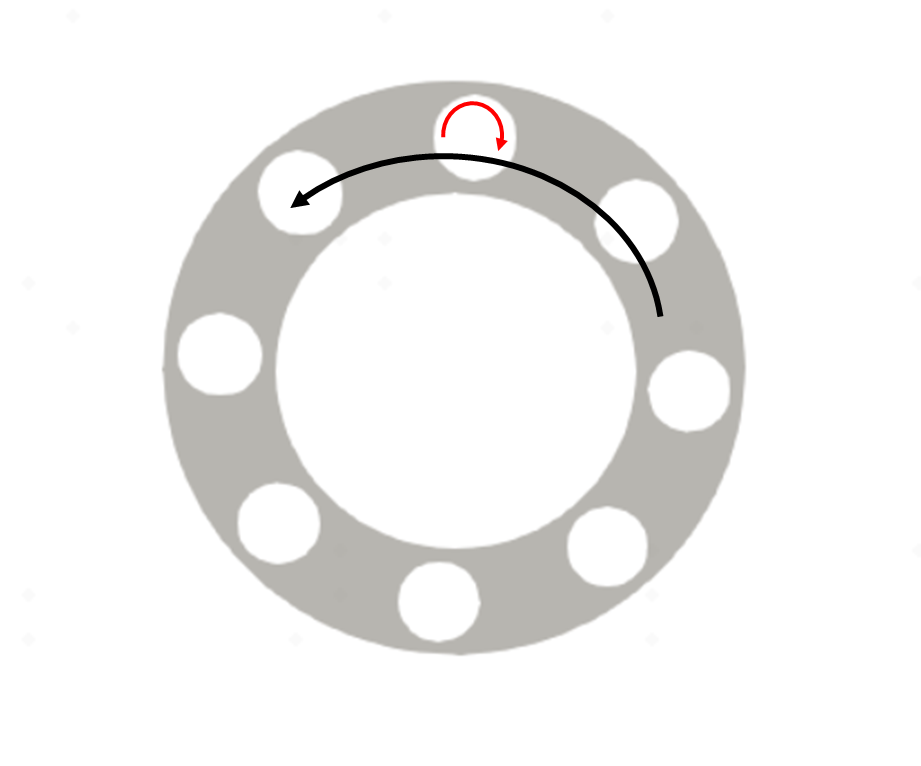
滑移网格多轴旋转两位前辈我现在在多轴组合运动上存在一些问题,想请教一下你们是怎么设置这种组合运动的吗?如果方便能给我一个类似案例设置文件吗?我的问题是一个球体在一个圆柱流域中公转加自转的组合运动。我目前尝试了设置,但是计算出现了发散,我转速很小的情况下库朗数居然会增加到几万。@卡洛 @冷空气LQW
/*--------------------------------*- C++ -*----------------------------------*\ | ========= | | | \\ / F ield | OpenFOAM: The Open Source CFD Toolbox | | \\ / O peration | Version: v2406 | | \\ / A nd | Website: www.openfoam.com | | \\/ M anipulation | | \*---------------------------------------------------------------------------*/ FoamFile { version 2.0; format ascii; class dictionary; object dynamicMeshDict; } // * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * * // dynamicFvMesh dynamicMultiMotionSolverFvMesh; // Specification of rotation around centre rotation1 { solidBodyMotionFunction rotatingMotion; rotatingMotionCoeffs { origin (0 0 0); axis (0 1 0); omega 5; } } dynamicMultiMotionSolverFvMeshCoeffs { domain { solver solidBody; cellZone domain; solidBodyCoeffs { $rotation1; } } ball { cellZone ball; solver solidBody; solidBodyCoeffs { solidBodyMotionFunction multiMotion; multiMotionCoeffs { rotation_1 { $rotation1; } rotation_2 { solidBodyMotionFunction rotatingMotion; rotatingMotionCoeffs { origin (0 0 0.018); axis (0 1 0); omega -50; } } } } } } // ************************************************************************* // -
在MRF/滑移网格模型中怎么设置旋转壁面上一个相对速度?实现类似SRF得到两个旋转速度的合成。模型介绍:一个轴承模型,腔体内部有钢球。轴承内圈旋转,外圈静止,球绕轴线公转加绕自心自转。目前一种方法是通过给流体域一个旋转速度,再给球壁面加自转壁面速度。
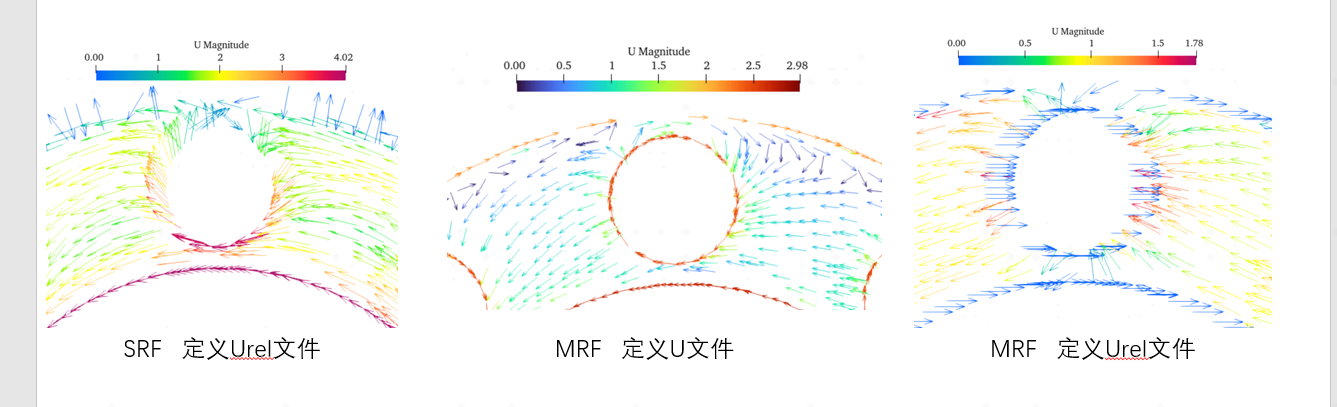
SRF模型能正确模拟球壁面附近两个速度合成矢量,但实际模型更复杂还包含其它静止区域,需要使用MRF或滑移网格方法。但是在MRF和滑移网格simpleFoam、pimpleFoam只能对绝对速度文件U进行设置,在旋转壁面上无法实现两个速度的合成。针对MRF和动网格能对旋转壁面进行相对速度的设置吗?像SRF那样设置Urel文件?
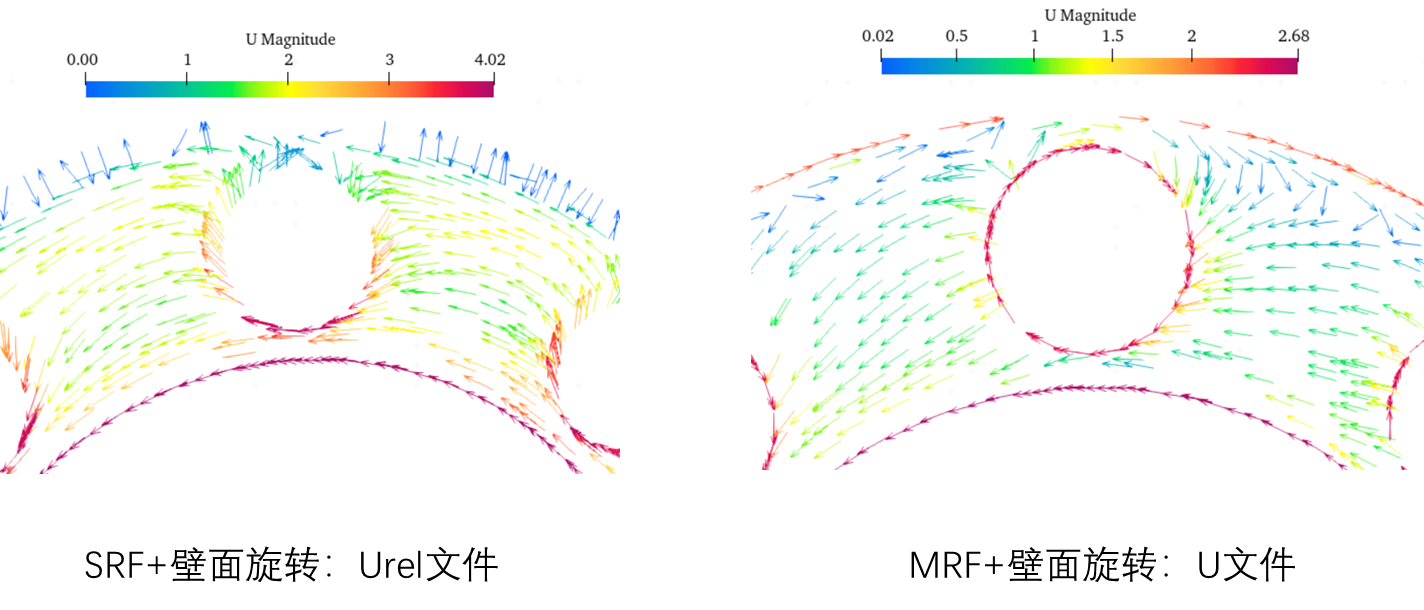
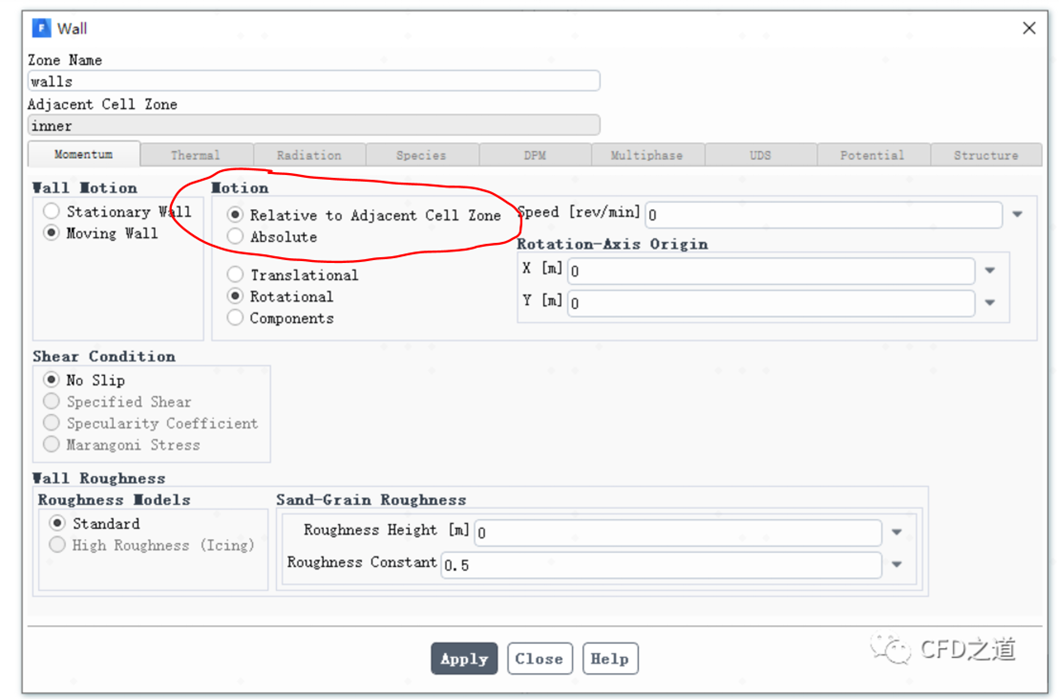
另外我发现在Fluent中似乎可以直接设置旋转壁面相对某个运动区域设置一个相对速度值。如下图,但我并没有尝试过不确定,我希望在OpenFOAM中进行类似设置。希望有大佬可以给我一些建议,非常感谢!!
最后附上我SRF模型和MRF模型的案例设置文件
MRF 副本.zip 本.zip)
SRF副本.zip -
关于openfoam中如何实现公转加自转的运动?@李东岳 我的模型两侧还有静止区域,只是这个简单模型还没加上,所以SRF是不适用的。
-
关于openfoam中如何实现公转加自转的运动?@李东岳 是的。 全部网格应该也行把 ,我看有个案例就是把全部网格MRF了。
-
关于openfoam中如何实现公转加自转的运动?我的模型两侧还有静止区域,只是这个简单模型还没加上,所以SRF是不适用的。
-
关于openfoam中如何实现公转加自转的运动?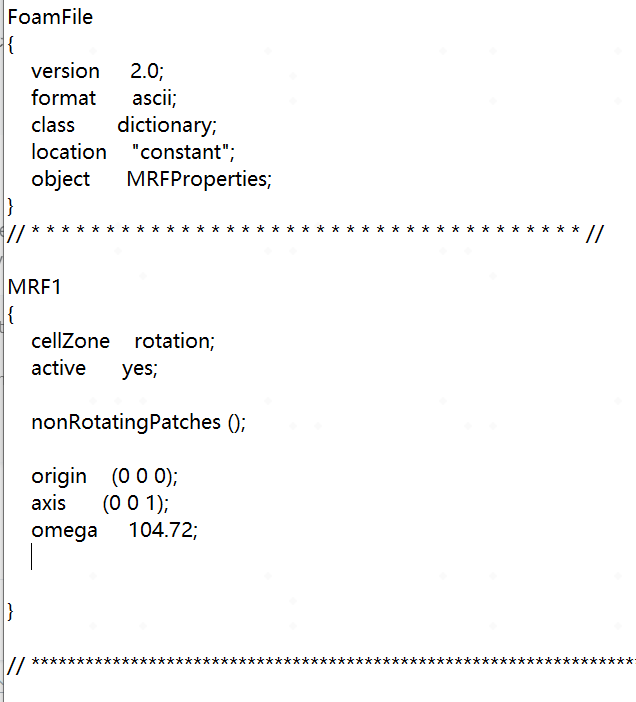
-
关于openfoam中如何实现公转加自转的运动?我用SRF模型定义Urel文件相对速度,一切正常,有自转公转速度合成方向。改用MRF模型,cellzoon为全部单元,定义U文件,发现我额外定义速度的边界上,附加不上MRF公转速度?改为Urel文件仍然不对。李老师能帮忙看下怎么回事吗,我真被这相对绝对速度搞混了。@李东岳
-
关于openfoam中如何实现公转加自转的运动?pisoFoam好像不支持动网格把?我也不太清楚,问下李老师把。@李东岳
-
关于openfoam中如何实现公转加自转的运动?@jsy SRF模型就是不旋转的,速度有旋转吗?你要想模型旋转就用滑移网格。