如何将一些固体particles的体积整合成一个球形的有效parcel
-
-
你好,我想和你确认一下你的问题
请问:- 瞬时的还是统计上的?
是这一 lagrangian timestep内这个cell中的Equivalent parcel diameter ?
还是euler timestep 的Equivalent parcel diameter?
还是你要得到这个一cell中统计学上的Equivalent parcel diameter?即over time
还是你需要生成一个新的Equivalent parcel代替原本cell中的parcel?
如果你给这个parcel的直径的话,of应该默认是球形的parcel吧?
- 瞬时的还是统计上的?
-
@zhe 在 如何将一些固体particles的体积整合成一个球形的有效parcel 中说:
间是等于把所有粒子平均化了,
-
如果你需要实现equivalent parcel我个人建议使用cloudfunction 来实现这样的功能,而且你需要remove 原来的parcel,在某个cloudfunction中有remove function 你可以借鉴一下。生成equaivalent parcel 需要你得到所有cell中的parcel信息,剩下就简单生成了,而且你生成的equivalent parcel 的大小也是一个问题,和cell size的关系是什么?
-
如果不考虑粒子的位置是不可能的,如果没有位置的话,就不可能tracking了啊,这就导致了以后所有的parcel的位置就在cell中心点,make no sense。我个人感觉如果按照你这个想法,不久应该是流场里面有无数个静止小球,只要对应的静止小球有相对应的relative velocity就可以了,不需要Euler Lagrangian模拟了
不知道你具体的case是什么样的,以上仅凭个人经验判断的,希望能没理解错你的意思,祝好运~
回来了,都回来了~
-
-
@星星星星晴 您说的对,这个应该是cloud层面的.我的想法主要是用来改善目前MPPIC中的interparticle stress.目前的这个用stress表达的并不准确,并且误差很大.如果换成纯粹的DPMFoam,那么就增大了很多计算量.所以我想,在MPPIC上,将每个网格里的粒子当做一个有效球体,与想要进入网格的粒子进行碰撞.那么也就是说,粒子本身还是parcel层面的,这样才能追踪;但同时,在进入别的网格时受到的碰撞效果由整个网格里的有效球体来实施.碰撞力根据DPM来.这样粒子就能避免目前MPPIC的inter-particle stress带来的误差.这样的话,算不算抹去了原本粒子呢?或者说原本位置上的粒子是有的,但是没有相互作用力,是不是更准确些?
-
回来了,都回来了~
-
回来了,都回来了~
-
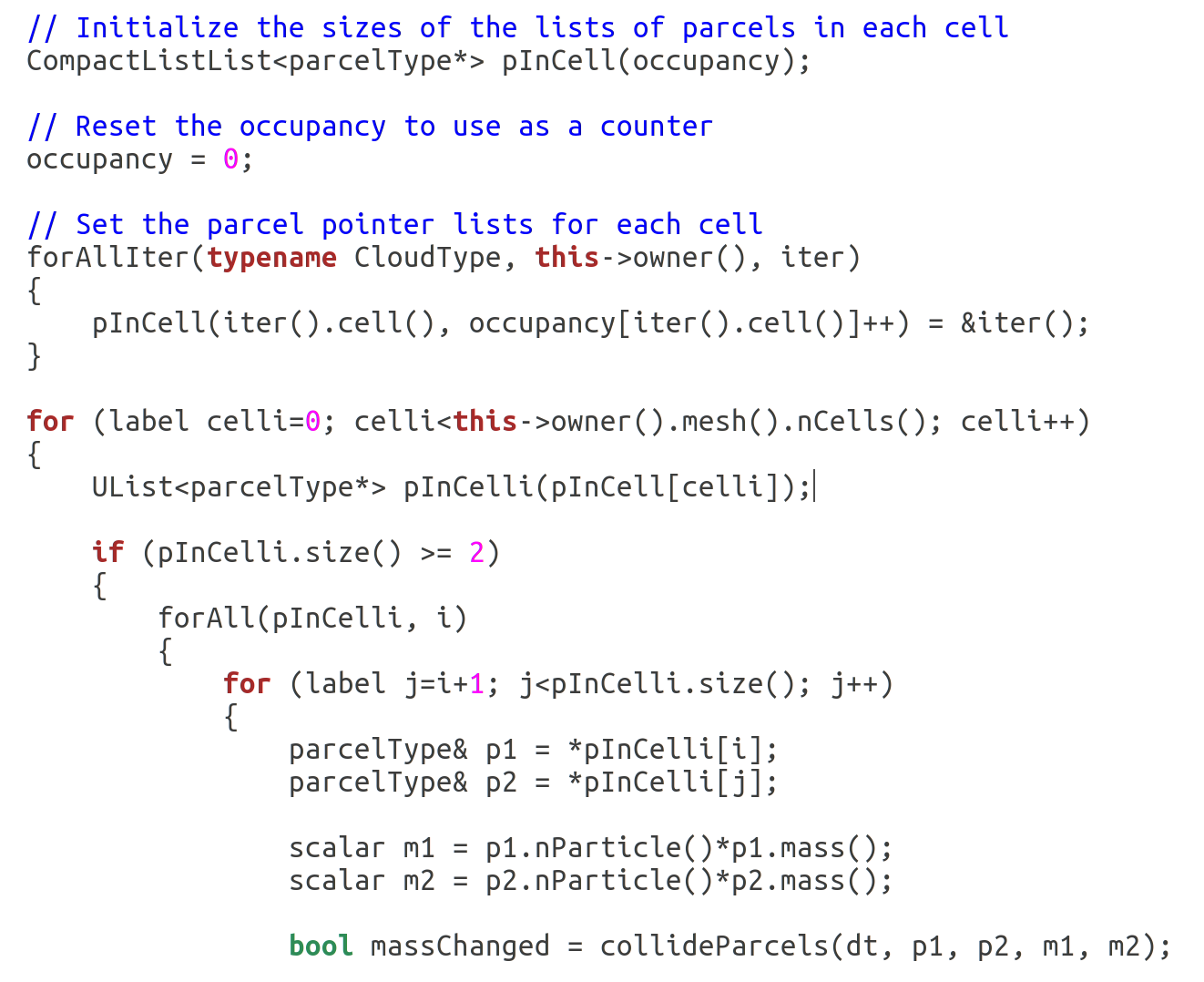
@zhe 我可能问的不太仔细,你看一下sprayCloud里面的 stochastic collision model,就是Orouke model, 和你想用的比较像,但是他是在cell中寻找另两个真parcel,你把真p1和真p2 其中的一个换成假parcel即可。
我们这边用的是这个模型
Influence of inter‐particle collisions and agglomeration on cyclone performance and collection efficiency
Oscar Lino Sgrott Júnior Martin Sommerfeld
还有
Validation of a stochastic Lagrangian modelling approach for inter-particle collisions in homogeneous isotropic turbulence
Martin sommerfeld
https://www.sciencedirect.com/science/article/abs/pii/S0301932201000350我们也是生成一个假parcel,pp碰撞
-
-