-
装逼没输过,吵架没赢过!
-
正好这几天在研究fluent里的DEM,DPM和DDPM具体是啥关系,碰到李博开的这一贴。写一下我的理解。
- 先说说标准的DEM吧,它代表的是真实的跟踪每一个颗粒的运动,通过硬球模型或软球模型(通常用软球模型)来计算颗粒间的碰撞过程,而且颗粒旋转也能捕捉到。简单理解就是,颗粒该受到的力都考虑到了。
- 而DPM和DDMP都是fluent里的概念,应该不属于通用的说法,之所以这样命名可能是由于为了符合它的软件设计逻辑。DPM在我看来是属于比较原始的离散相模型,不考虑颗粒碰撞,不考虑颗粒所占体积,通常用来模拟灰尘的轨迹。
This approach is made considerably simpler when particle-particle interactions can be neglected, and this requires that the dispersed second phase occupies a low volume fraction, even though high mass loading is acceptable. The particle or droplet trajectories are computed individually at specified intervals during the fluid phase calculation. This makes the model appropriate for the modeling of spray dryers, coal and liquid fuel combustion, and some particle-laden flows, but inappropriate for the modeling of liquid-liquid mixtures, fluidized beds, or any application where the volume fraction of the second phase cannot be neglected. For applications such as these, particle-particle interactions can be included using the Discrete Element Model, which is discussed in Discrete Element Method Collision Model.
--from ANSYS 17.0 help, Fluent Theory guide, 16.1.1. The Euler-Lagrange Approach
-
DDPM 是Dense Discrete Phase Model的缩写,是专门用来模拟例如流化床这种稠密颗粒流的模型,可以理解为简化了的DEM。它考虑了颗粒的空隙率以及碰撞,但是对于碰撞的计算是进行了模化的,不是用软球模型计算真实的碰撞过程,颗粒间的碰撞产生的力是根据KTGF下颗粒的stress tensor计算得到。
-
上面说了DDPM里颗粒碰撞是进行了模化的,因此就有不进行模化的处理,那就是在Fluent里加入DEM collision了。加入了DEM collision的DDPM,也即DDPM+DEM,考虑了稠密颗粒流的真实碰撞过程,新版的Fluent里,据我观察也是可以加入rotation的。但是Fluent里的DEM的颗粒群又是用parcel代替的,这又导致有些像MPPIC。所以,可以说DDPM+DEM和真正的DEM的还差一步。
以上的内容仅代表个人观点,如有理解上的疏漏或错误,感谢能够给予指正。
Blog: http://www.cnblogs.com/Jay-CFD/
Research Gate: https://www.researchgate.net/profile/Weijie_Yin2 -
最近开始在做模拟,准备用
DPMFoam,但是模拟中需要加入传热和化学反应。看了下代码似乎DPMFoam可以加入传热的,但是不知道可以用哪些传热模型?另外就是想请问下DPMFoam可以加入化学反应吗? -
@hurricane007 MFIX最新版本的DEM是可以加入化学反应的。
Blog: http://www.cnblogs.com/Jay-CFD/
Research Gate: https://www.researchgate.net/profile/Weijie_Yin2 -
-
@hurricane007 那就关注一下他们近期是否会出这个功能吧
Blog: http://www.cnblogs.com/Jay-CFD/
Research Gate: https://www.researchgate.net/profile/Weijie_Yin2 -
-
@hurricane007 OpenFOAM的
DPMFoam我添加过化学反应,不是很难的。你好好关注一下lagrangian/intermediate库。 -
-
@散漫守望2016 想到一个很蠢问题,添加化学反应首先应该要把
DPMFoam加上能量方程?因为我用的是高温,气体温度估计从100度到600度变化,所以需要可压求解器?然后最近在做这一步都感觉好难。。。 -
@hurricane007
我对DEM算法不是很熟悉,不过我在单相流和多相流中添加过单向耦合的粒子。如果你需要耦合,无非就是在DPMFoam类求解器下添加反应和能量,要么就是在反应和能量求解器中添加粒子。我看你目前的做法是基于DPMFoam添加反应和能量,是否可以换一种思路?比如在reactingFoam里面添加粒子。 -
这个帖子发出来2年多,2015年的这个时候我主要做欧拉欧拉模型,2017年年初开始做一种欧拉欧拉和欧拉拉格朗日的混合方法,最近转了纯欧拉拉格朗日,加深了一点理解。
多相系统
欧拉欧拉和欧拉拉格朗日主要用于描述多相系统,欧拉欧拉是两相均用欧拉NS方程描述,欧拉拉格朗日是一相用欧拉,一相用拉格朗日方程描述。对于两相系统,欧拉欧拉方法模型为双流体模型(Two fluid model,TFM),欧拉拉格朗日方法为Discrete Particle Model(DPM)。
从数学形式上,DPM的控制方程要比TFM中的离散相方程简单,比如这个是DPM中描述粒子的速度方程(牛顿第二定律):
\begin{equation}\label{DPM1}
m\frac{\mathrm{d}\mathbf{U}}{\mathrm{d}t}=\mathbf{F}
\end{equation}
\begin{equation}\label{DPM2}
\frac{\mathrm{d}\mathbf{x}}{\mathrm{d}t}=\mathbf{U}
\end{equation}
这个是描述粒子的欧拉方程(2018.01.04更新:经石油大学某同学建议改正符号错误):
\begin{equation}\label{TFM1}
\frac{\partial \alpha\mathbf{U}}{\partial t}+\nabla\cdot\left(\alpha\mathbf{U}\mathbf{U} \right )-\nabla\cdot\tau=-\alpha\nabla p+\mathbf{g}+\mathbf{M}
\end{equation}
\begin{equation}\label{TFM2}
\frac{\partial \alpha}{\partial t}+\nabla\cdot\left(\alpha\mathbf{U} \right )=0
\end{equation}
很明显,拉格朗日方程是一个单纯的ODE,在将方程右边某些力简化的情况下,这个ODE是存在解析解的。欧拉方程需要数值求解,并且耗散性比较严重。如果只是单纯的求解方程\eqref{DPM1}和\eqref{DPM2},你都不需要网格,直接求解就可以,这只是单纯的ODE。
个人感觉TFM要比DPM的求解数值上问题比较多,比如比较出名的相分数有界、高梯度区域力的模化、相分离导致的奇异、高阶格式震荡等等等等。DPM都不存在这些问题。
但是如果看DPM的算法,如何跟踪粒子的位置信息占据了大头。目前的算法,即使将网格拆分成为四面体,依然会发生粒子丢失的现象,在某些网格较差的情况下,会陷入死循环。
求解器不发散,就是一直loop :big_mouth:
DPM,DEM,MPPIC
在考虑多相流的情况下,一般颗粒相用方程\eqref{DPM1}和\eqref{DPM2}来描述,连续相用NS方程来描述,也就是同时求解\eqref{DPM1},\eqref{DPM2},\eqref{TFM1}和\eqref{TFM2}。
同时求解这四个方程最重要的问题就是效率问题。
-
求解不需要网格的ODE方程需要高效的处理粒子跟踪位置问题,这个问题处理不好很容易导致粒子算着算着丢失了。一个一个粒子去找当然可以,但是如果有10e7个粒子肯定没办法处理。在OpenFOAM中,通过将网格四面体化来处理,由于商软代码不开源,不知道商软如何处理粒子位置跟踪的效率问题。
-
粒子间作用力的处理,在这里,如果考虑OpenFOAM中的DPM模型(商软中的DPM不清楚是否也是这样),方程\eqref{DPM1}中右边的力主要包含了曳力、虚拟质量力等非常主要的力。但是在DEM中,除了上述的力,还有旋转、摩擦、凝聚等,比较重要的颗粒碰撞也通过软球模型来处理(下图是google随便找的)。
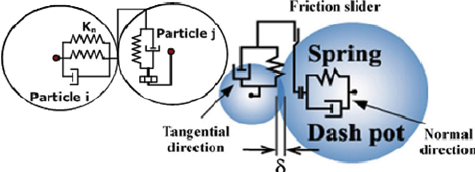
所以说,DEM 处理的力更加全面,并且在DEM中对于颗粒的形状也会进行考虑,形状会进一步影响力的作用。 -
MPPIC是为了更加的追求高效的一套算法。在MPPIC中,多个particle被打包到一起并被称之为parcel,在计算parcel运动的同时,插值出欧拉场。欧拉场的作用在于在MPPIC的控制方程中添加一个固相应力。在TFM中,也存在这样一个固相应力,因为TFM是欧拉框架下的。也就是说,MPPIC中,碰撞模型通过欧拉场的固相应力进行表征。为什么这么做?大量的节省用于计算颗粒碰撞导致特别小的时间步长。这在OpenFOAM的代码中很直接的表现出来:
#ifdef MPPIC #include "basicKinematicMPPICCloud.H" #define basicKinematicTypeCloud basicKinematicMPPICCloud #else #include "basicKinematicCollidingCloud.H" #define basicKinematicTypeCloud basicKinematicCollidingCloud #endif如果是MPPIC方法,调用MPPIC的碰撞模型(
basicKinematicMPPICCloud.H),如果是DPM,调用碰撞模型(basicKinematicCollidingCloud.H)。
Misleading
另外好像现在各大厂里面的各种算法虽然是一个名字,但是使用的算法不同,比如按照 @散漫守望2016 所说:
Fluent中的DPM模型只能处理稀相的气固(气液)两相流,一般我们称它为“双向耦合”,颗粒颗粒间不发生碰撞以及在流体方程中不考虑空隙率。
但是在OpenFOAM中的
DPMFoam也可以处理碰撞以及体积分数耦合问题。同时DPMFoam也可以使用DEM中的软球模型,虽然他被叫成了DPMFoam,并且DPMFoam也可以调用MPPIC中parcel的概念。据我所知,parcel这个概念最早出现在Andrews and O'Rourke 1995年的文章中。同时,MPPIC在ANSYS Fluent中被称之为DDPM,在称之为CPFD。
最近我在用欧拉拉格朗日和精确解对比然后模拟3D鼓泡床 :cheeky:
CFD算法编程课: http://dyfluid.com/class.html
需要帮助debug算例的看这个 https://cfd-china.com/topic/8018
-
-
东岳兄这个回复很详细,我有一些补充。
- 我感觉DPM的控制方程虽然是个ODE,但是在运算的过程中其实 F 是在变的,理论上说解析解存在,但是在一个实际系统里面由于F在变,所以其实并没有意义。
- 跟踪粒子的位置信息占了大头,其实应该说是碰撞探测占了大头,在MPPIC里面也跟踪粒子,但是速度快得多;
- MPPIC 高效在用一个 solid stress 来模拟碰撞,因此不需要确定颗粒碰撞了,这一点省了很多时间,对于parcel 用一个点来跟踪多个颗粒,在DPM也有做,叫做coarsed grain DPM; 但是做parcel都需要一个子模型来模拟这个parcel的行为,我测试下来,对于一个 N 颗粒系统,如果一个parcel包含nParcel 个颗粒,那么 计算时间的比值大概是 T(single particle) / T(parcel) = (nParcel)^1/3 。
-